:Euler-Lagrange equations
These equations are called the Euler-Lagrange equations for the variational problem. The 'conjugate momentum' for a generalized coordinate is defined by the equation . An important special case of these equations occurs when L does not contain a generalized coordinate explicitly, i.e., : if , the conjugate momentum is constant. In such cases, the coordinate is called a 'cyclic coordinate'. For example, if we use polar coordinates t, r, θ to describe the planar motion of a particle, and if L does not depend on θ, the conjugate momentum is the conserved angular momentum. Hamilton Prensibi
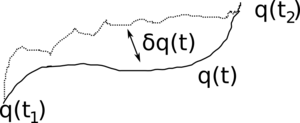
Kısaca: ye sonuçlanır, \mathcalS'de değişir. \mathcalS eylemi bir fonksiyoneldir, yani, giriş olarak bir fonksiyonu alır ve tek bir skaler numara geri verir. In terms of functional analysis, Hamilton's principle states that the true evolution of a physical system is a solution of the functional equation ...devamı ☟
Bu konuda henüz görüş yok.